|
Philipp Schröppel I am a PhD student in the Computer Vision Group at the University of Freiburg, headed by Prof. Thomas Brox. My broad research interest is 3D reconstruction in terms of 3d geometry, ego‑motion and object motion. A particular focus is robust application on arbitrary real‑world data. Currently I am doing a research internship at the Geometric Representation Learning group within the Max Planck Institute for Informatics, where I am working on 3D object centric learning. |

|
Publications |

|
Diffusion for Out-of-Distribution Detection on Road Scenes and Beyond
Silvio Galesso*, Philipp Schröppel*, Hssan Driss, Thomas Brox (* denotes equal contribution) ECCV, 2024 Paper / Code / ADE-OoD Benchmark / Bibtex We introduce ADE-OoD, a novel benchmark for out-of-distribution (OoD) detection for semantic segmentation on general natural images, and DOoD, a diffusion-based method that detects OoD samples by perturbing them and checking the directional error of the estimated score. |
|
Neural Point Cloud Diffusion for Disentangled 3D Shape and Appearance Generation
Philipp Schröppel, Christopher Wewer, Jan Eric Lenssen, Eddy Ilg, Thomas Brox CVPR, 2024 Paper / Project page / Code / Bibtex We generate 3D shape and appearance of objects via diffusion on neural point clouds (points with a 3D position and a learned feature). As the point positions represent the coarse shape and the features represent the appearance, shape and appearance can be generated separately. |
|
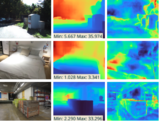
A Benchmark and a Baseline for Robust Multi-view Depth Estimation
Philipp Schröppel, Jan Bechtold, Artemij Amiranashvili, Thomas Brox 3DV, 2022 Paper / Code / Bibtex We introduce a benchmark for robust zero-shot multi-view depth estimation and evaluate many recent models. We present a new model that works more robustly across data from different domains and can serve as a baseline for future evaluations on the benchmark. |

|
SF2SE3: Clustering Scene Flow into SE (3)-Motions via Proposal and Selection
Leonhard Sommer, Philipp Schröppel, Thomas Brox GCPR, 2022 Paper / Code / Bibtex We propose SF2SE3, an approach estimate a moving object segmentation and corresponding SE(3) motions from optical flow and depth. It works by iteratively sampling motion proposals and selecting the best ones with respect to a maximum coverage formulation. |

|
Semi-Supervised Disparity Estimation with Deep Feature Reconstruction
Julia Guerrero-Viu, Sergio Izquierdo, Philipp Schröppel, Thomas Brox CVPR Women in Computer Vision Workshop, 2021 Paper We train a network for disparity estimation in a semi-supervised fashion on labeled synthetic data and unlabeled real data. For supervision on the unlabeled data, we explore a deep feature reconstruction loss, instead of the commonly used photometric loss. |
|
The template for this website comes from Jon Barron. Thanks! |